



















6 - 27
6. APPLICATION FUNCTIONS
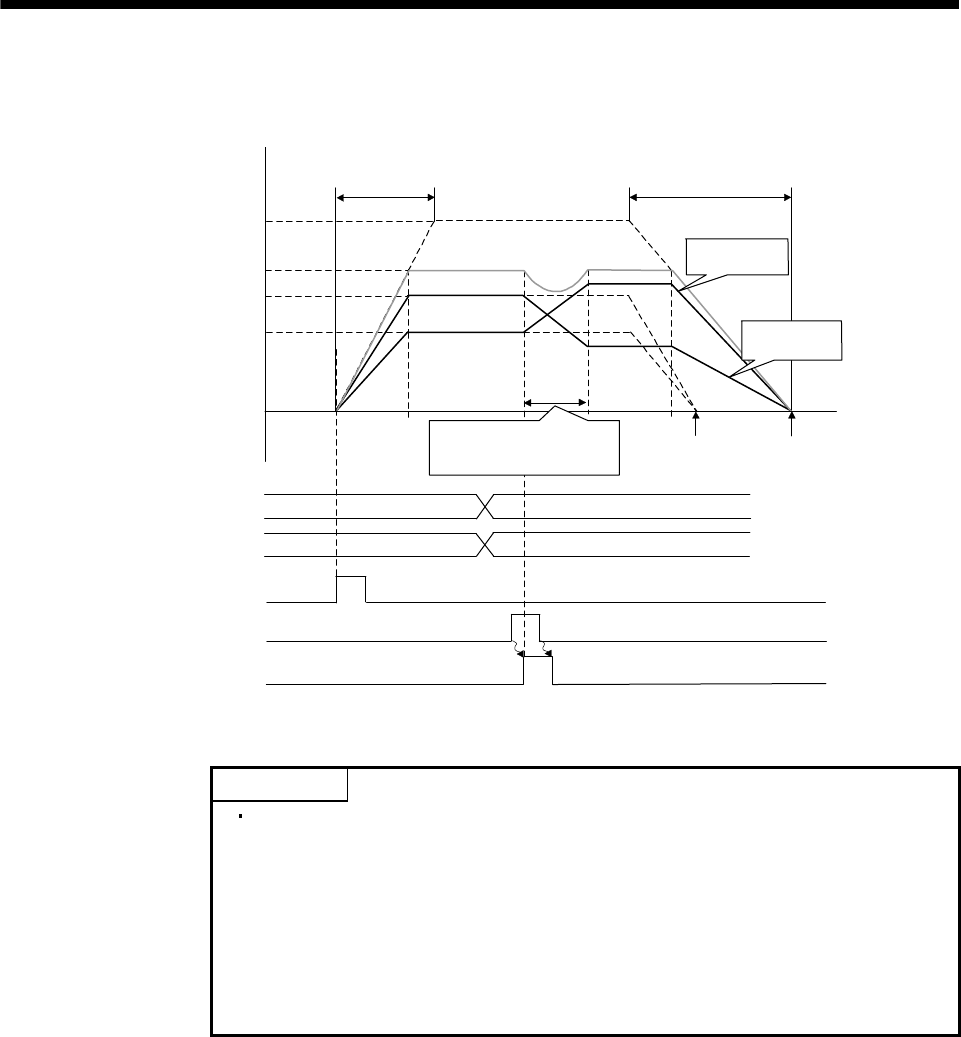
(b) For linear interpolation operation
An example of the position change when axis 1 and 2 are linearly interpolated is shown below.
Linear interpolation
speed limit value
Command speed
(Vector speed)
0
Acceleration time constant
Deceleration time constant
Command position 2
Command position 4
Command position 1
Command position 3
Command position 1 Command position 2
ON
OFF
ON
OFF
ON
OFF
Command position 3 Command position 4
Command position (axis 1)
Command position (axis 2)
Start operation (ST)
Position change (PCHG)
Completion of preparation
f
or changing position (PCF)
Axis 2 speed
Axis 1 speed
Acceleration/deceleration
reducing speed variation
POINT
Acceleration/deceleration of each axis from the current command speed to
the command speed after position change is determined by distributing
acceleration amount, which is determined by the acceleration time constant,
to each axis according to speed variation ratio of the axes. During this time,
S-curve acceleration/deceleration and start up speed are invalid, and
acceleration/deceleration reducing the speed variation at position change is
performed. (That acceleration/deceleration is similar to the linear
acceleration/deceleration. However, smoothing filter is valid.)