



















9 - 2
9. INTERFACE MODE
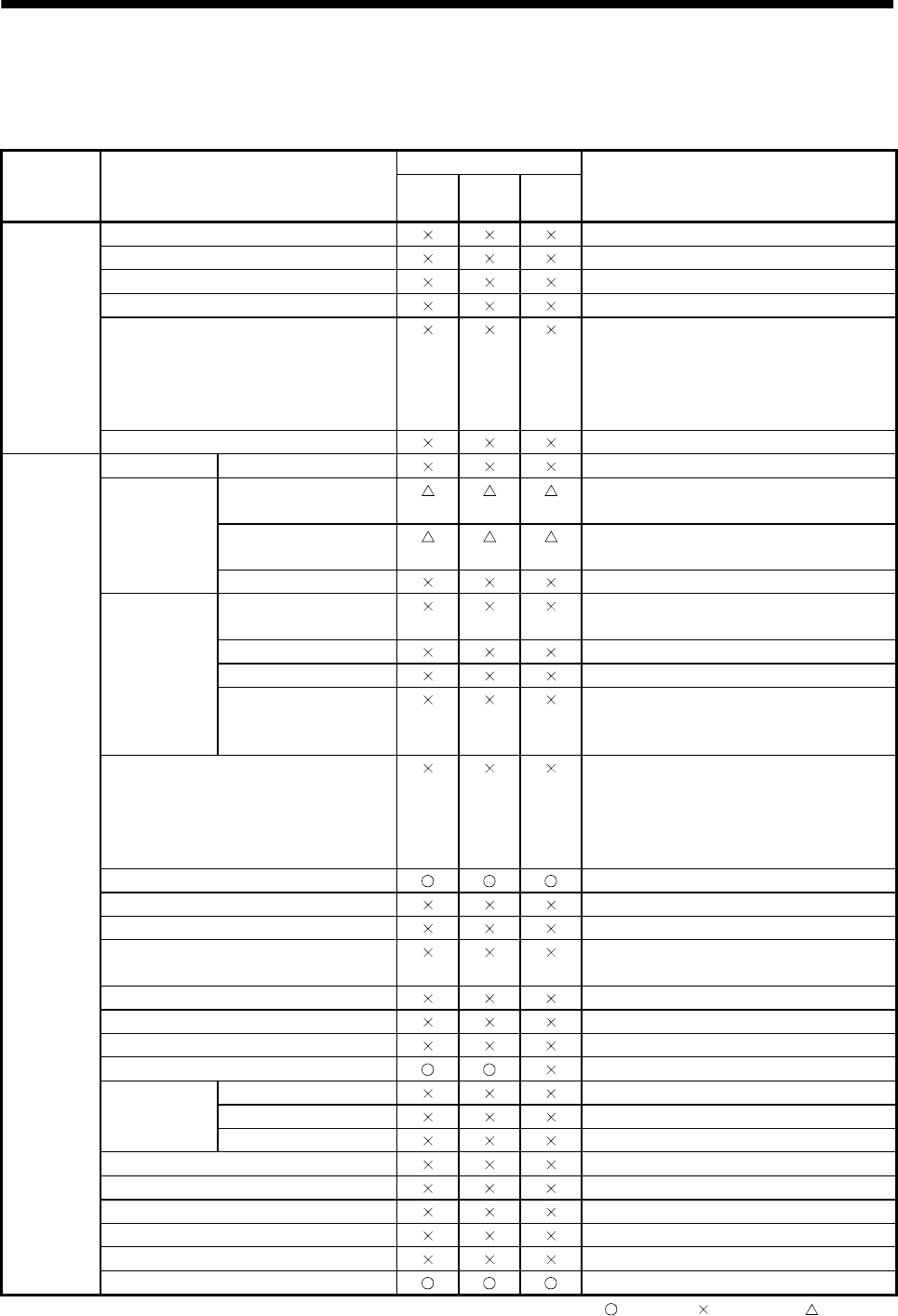
9.2 Combinations with functions
The following shows the combinations of interface mode with each function.
Classification Function
Control mode
Remarks
Position
control
Speed
control
Torque
control
Operational
function
JOG operation
Incremental feed
Automatic operation
Linear interpolation
Home position return The normal home position return function is
invalid. After moving to the home position, use
the home position set command.
Check the DOG signal status with the high-
speed monitor.
Home position reset function
Application
function
Command units Electronic gear Command units are always pulse units.
Speed unit Speed unit Related only to speed units during monitor
output.
Speed units multiplication
factor
Related only to speed units during monitor
output.
Speed limit
Acceleration/
deceleration
Linear
acceleration/deceleration
Smoothing filter
Start up speed validity
S-curve acceleration/
deceleration (Sine
acceleration/deceleration)
Servo off The system becomes servo free. Follow up
processes are not performed after servo off.
Perform them with the user program.
Operation stop by servo off is invalid. Perform
servo off after a deceleration stop.
Forced stop
Stop operation
Rapid stop operation
Limit switch (stroke end) Check the LSP/LSN signal status with the
high-speed monitor.
Software limit
Interlock
Rough match output
Torque limit
Command
change
Speed change
Change of time constants
Position change
Backlash
Position switch
Completion of operation signal
Interference check function
Home position search limit
Gain switching
: Usable : Unusable : Restriction