



















9 - 3
9. INTERFACE MODE
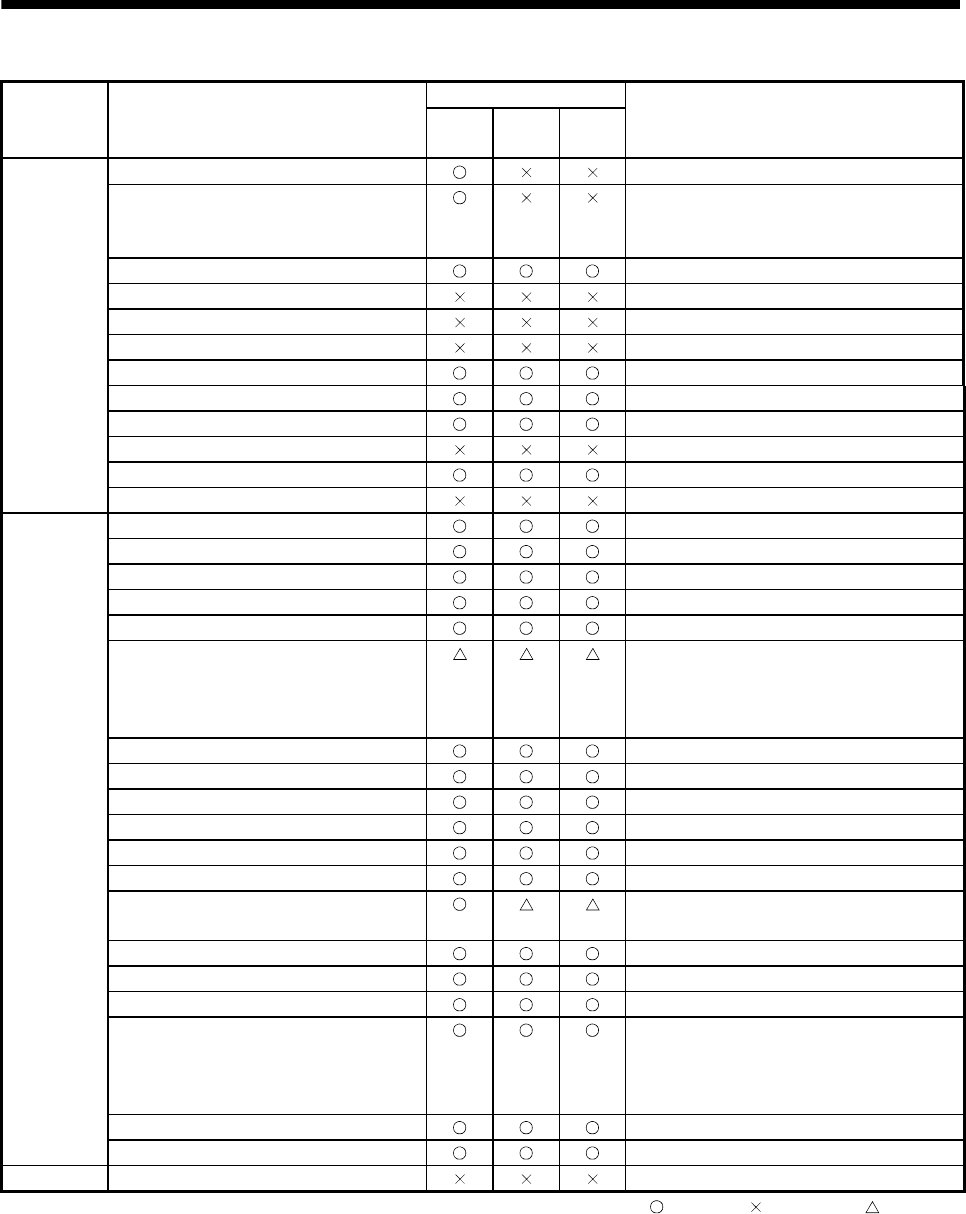
Classification Function
Control mode
Remarks
Position
control
Speed
control
Torque
control
Application
function
PI-PID switching
Home position set If home position set request is turned ON at
speed control/torque control, home position set
error (ZSE) turns ON.
Absolute position detection system
Home position return request
High response I/F
Other axes start
Digital input/output
Servo amplifier general input/output
Dual port memory exclusive control
Pass position interrupt
Mark detection
Continuous operation to torque control
Auxiliary
function
Reading/writing parameters
Changing parameters at the servo
Alarm and system error
Monitor function
High speed monitor function
Interrupt Interrupt output is not performed by factor of
interrupt.
Interrupt is output according to the interrupt
output cycle settings only during interrupt valid.
Interrupt output cycle Can only be used in interface mode.
Command data update cycle Can only be used in interface mode.
User watchdog function
Software reboot function
Parameter backup
Test mode
Reconnect/disconnect function When reconnecting, startup is in position
control mode.
Sampling
Log
Operation cycle monitor function
Amplifier-less axis function For torque control mode, operation stops when
torque command is 0.0%, or when torque
control speed limit value is 0, and zero speed
(ZSP) turns ON.
Alarm history function
External forced stop disabled
Tandem drive Tandem drive
: Usable : Unusable : Restriction