



















1 - 2
1. SUMMARY
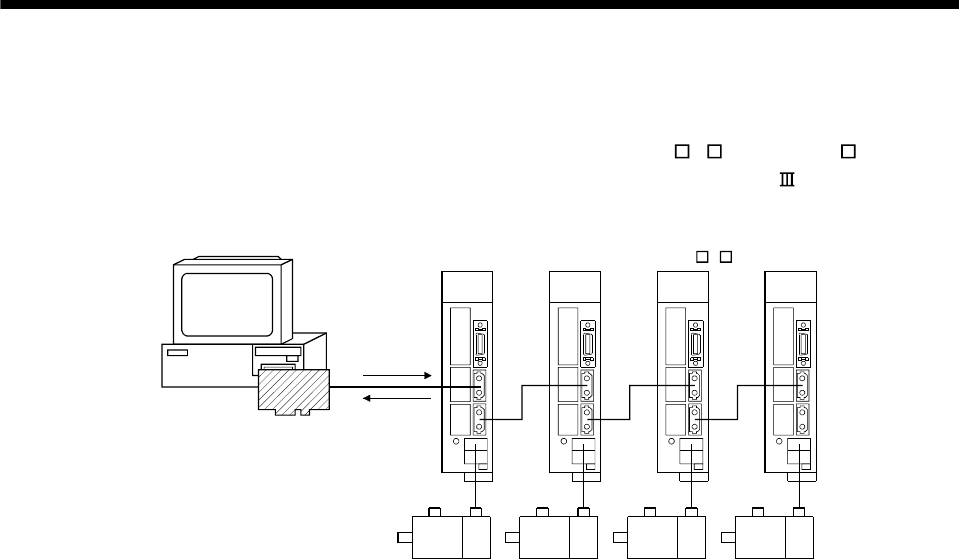
(1) PCI bus compatible position board
The PCI bus compatible position board (MR-MC210/MR-MC211) is a board compatible with PCI bus
mounted to the host controller and controls our servo amplifiers (MR-J4(W
)- B/MR-J3(W)- B). The PCI
bus compatible position board and the servo amplifiers are connected with SSCNET
/H, which is a high
speed synchronous network.
Position
instructions
parameters
Position
feedback
Speed
feedback
Host controller
Position
board
Servo amplifier (MR-J4(W )-
B)Servo amplifier (MR-J4(W )-
B)
For the PCI bus compatible position board, there are two types, MR-MC210 and MR-MC211.
The MR-MC210 has one SSCNET control channel (hereinafter: CH) and one SSCNET line (hereinafter:
line), and can control positioning for up to 20 axes. The MR-MC211 has one SSCNET control channel and
two SSCNET lines, and can control positioning for up to 32 axes (up to 20 axes per line). By reading and
writing the dual port memory mapped to the memory space of the PCI bus, the host controller can
command position board to start operation, and get servo amplifier status. The host controller can also
receive position pass and positioning complete interruptions via PCI bus.
The position board is equipped with standard mode and interface mode for positioning control. The
positioning control mode that corresponds with the application can be selected by parameter. The mode
cannot be changed during SSCNET communication (while system is running). Positioning in standard
mode is performed using a point table mapped on the dual port memory of the position board. Arbitrary
positioning is possible by writing data to this point table from the host controller.
Also, startup of JOG operation and home position return, etc. as well as parameters changing and
monitoring are possible through accessing this dual port memory on the position board from the host
controller.
Interface mode is a sequential positioning command method that uses a user program on the host
controller. The user program controls the servo amplifier with an arbitrary acceleration/deceleration pattern
by writing the position command to the position command buffer of the position board every communication
cycle (control cycle). Some functions from standard mode cannot be used, or are restricted when in
interface mode.