



















9 - 33
9. INTERFACE MODE
9.8 Servo off
When axes are moved by an external force during servo off, perform a follow up (refer to the formula below)
that updates the position command to align with the movement (feedback position).
CAUTION
If a follow up is not performed, the servo amplifiers will align the current command position with the
position command at servo on, and the motors may operate at a very high speed.
Position command = Feedback position
Machinery command position = Position command – Home position offset
Coordinate return processing such as home position return after servo off are not necessary. If servo off is
performed during axis operation, a free-run state occurs which is very dangerous. Be sure to servo off after
stopping operation.
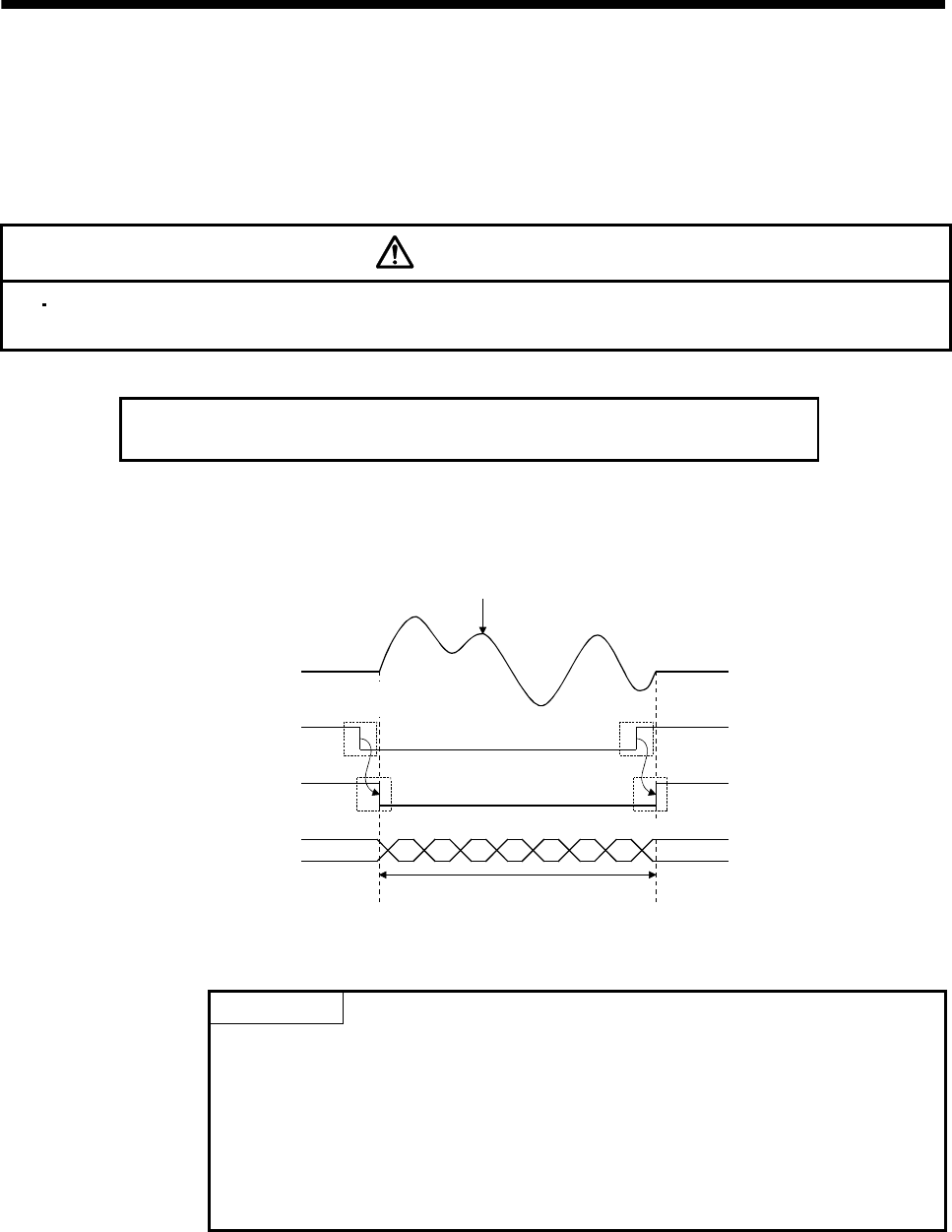
sscSetCommandBitSignalEx function
(SSC_CMDBIT_AX_SON)
sscWaitStatusBitSignalEx
(SSC_STSBIT_AX_RDY)
sscIfmRenewLatestBufferEx function
Servo on (SON)
Servo ready (RDY)
Moving speed
Current command
positon
Movement by an external force
During servo off, update position
command to align with movement.
POINT
• After updating the position command to match the current feedback position,
do not servo on until the transmit position command buffer number is the
same as the latest position command buffer number.
• When the command data update cycle (control cycle × 2 or more) is set, the
time of the command data update cycle set to the position board follow up
applies. When the command data update cycle is set, make sure servo on is
performed at the next command data update or later.