



















6 - 52
6. APPLICATION FUNCTIONS
6.20 PI-PID switching
By turning on the PID control command signal (CPC), control of the servo amplifier is changed to PID control
from PI control. Use this function, for example, to remove any interference (torsion) between tandem drive axes
by operating an axis (slave axis) under PID control. When using the PI-PID switching function, set the following
servo parameters.
For servo parameter (MR-J4(W
)- B)
Parameter No.
MR-J4-B
Parameter No.
Abbreviation Name Setting value
1157 PB24 *MVS Slight vibration suppression control 0 (PI control is valid (can be
switched to PID control by the command
from controller).)
POINT
Refer to the Servo Amplifier Instruction Manual on your servo amplifier
concerning details for the servo parameters.
To use the PI-PID switching function, first set the gain adjustment mode to a
manual mode by changing an auto-tuning mode (parameter No.1107) to 3
(manual mode). If the gain adjustment mode is in an auto-tuning mode, the
PI-PID switching function cannot be used.
API LIBRARY
To turn ON/OFF the PI-PID switching command (CPC), set
SSC_CMDBIT_AX_CPC to the command bit number of the
sscSetCommandBitSignalEx function.
To check if during PID control (SPC) is ON/OFF, set SSC_STSBIT_AX_PID
to the status bit number with the sscGetStatusBitSignalEx or
sscWaitStatusBitSignalEx function.
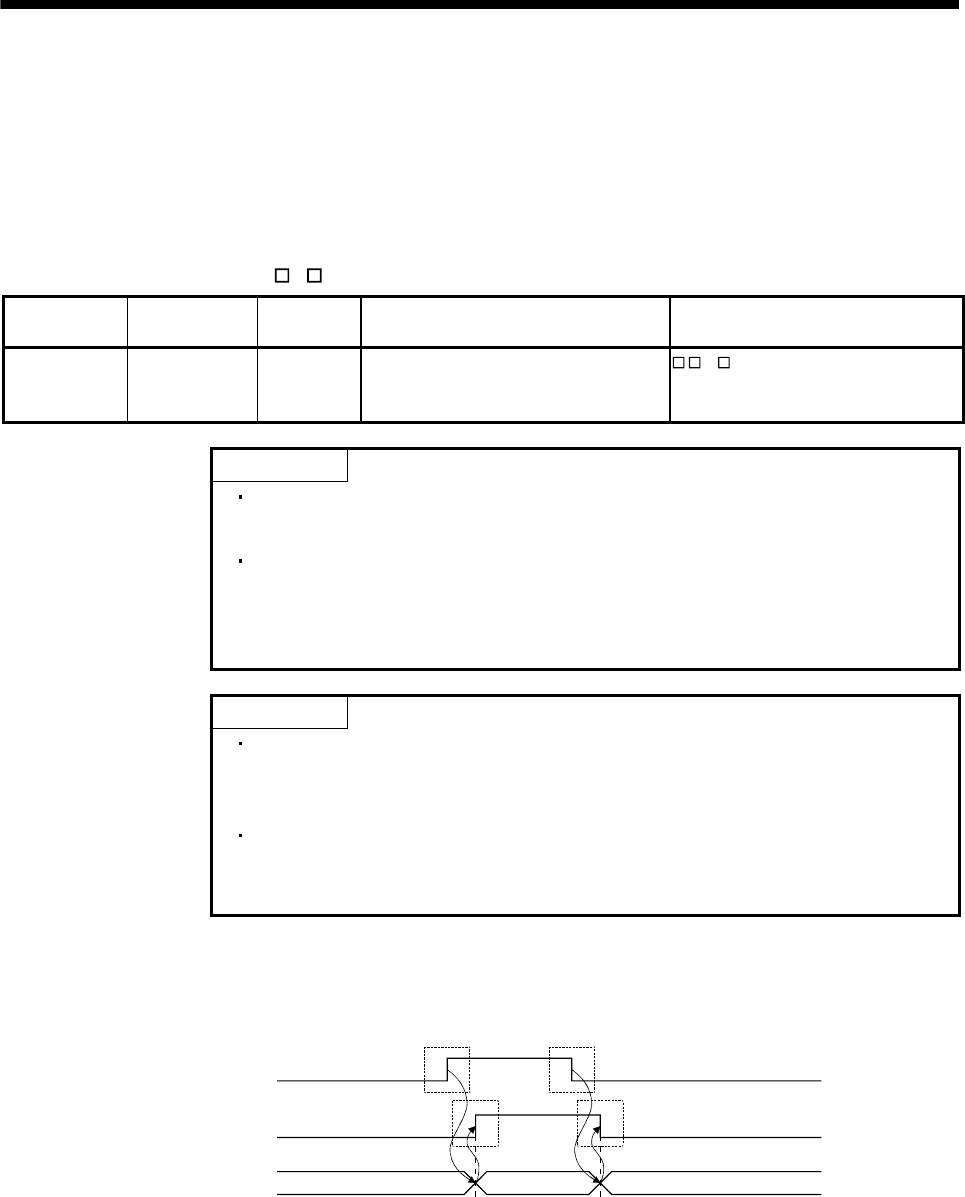
A timing chart using for PI-PID switching is shown below.
sscSetCommandBitSignalEx function
(SSC_CMDBIT_AX_CPC)
ON
OFF
ON
OFF
During PID control
(SPC)
Servo amplifier side
control details
PID control command
(CPC)
PI control PID control PI control
sscWaitStatusBitSignalEx function
(SSC_STSBIT_AX_SPC)