



















9 - 12
9. INTERFACE MODE
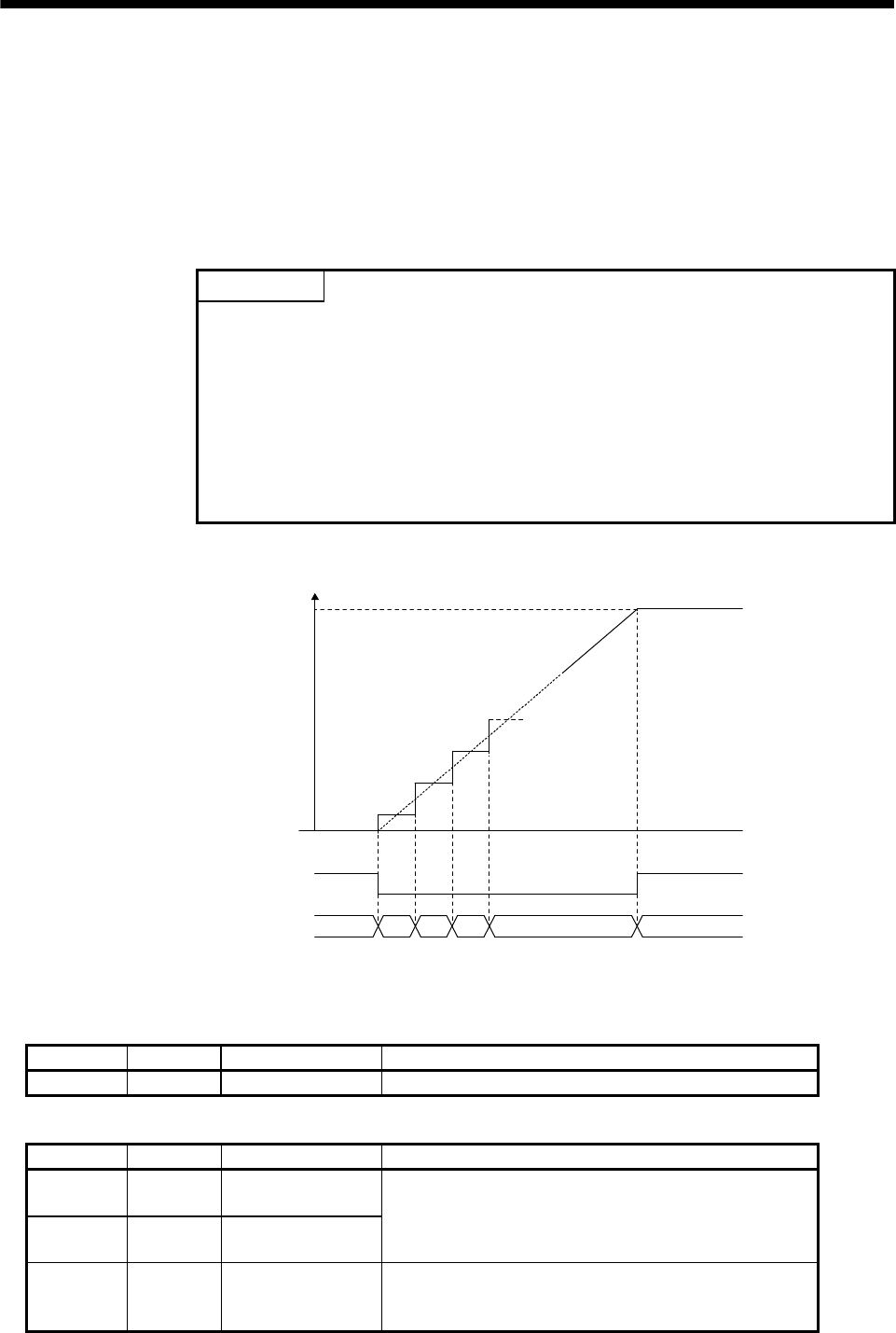
9.5.2 Position control mode
Position control mode is where position commands (absolute position in pulse units) generated by the user
program can be sent to the servo amplifier. The position command buffer is made up of position data × a
maximum of 64 ring buffers, and is controlled with the latest position command buffer number and the
transmitting position buffer number.
Refer to Section 9.5.5 or Section 9.5.6 for the update method of the buffer.
POINT
• For the setting value of the position command buffer, ensure that the
difference between the previous command value and the current command
value is no more than 20000000. When the difference between the previous
command value and the current command value exceeds 20000000,
command data error (operation alarm A7, detail No.03) occurs, followed by an
immediate stop.
• When an alarm other than command data error (operation alarm A7, detail
No.03) occurs, conduct a deceleration stop by the user program.
In-position (INP)
Position command data
0 100 200 300 400 to 10000
10000
Position
10000
(1) Parameter
(a) System parameter
Parameter No. Abbreviation Name Remarks
000F *IFMO Interface mode option Specify the interrupt output cycle and command data update cycle.
(b) Control parameter
Parameter No. Abbreviation Name Remarks
0210 TLP Forward rotation
torque limit value
Becomes valid when using torque limit.
0211 TLN Reverse rotation
torque limit value
023F *IFBN Interface mode
maximum buffer
number
Set the maximum buffer number of the position command buffer.
Note. When interrupt output is invalid in interface mode, 1 or
higher must be set.