

















8 - 10
8. TANDEM DRIVE
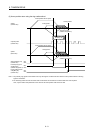
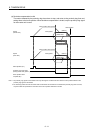
(4) Home position return using a dog front end method
Home position return using a dog front end method uses the proximity dog front end as the home position.
The following two methods are available for the home position return using a dog front end method with the
tandem drive axes: using the proximity dog front end on the master axis as the home position and detecting
each proximity dog front end for the master axis and slave axis to perform tweaking (compensation of
deviation between master axis and slave axis). Set either of the methods with the compensation of home
position return deviation in the tandem drive options (parameter No.0265).
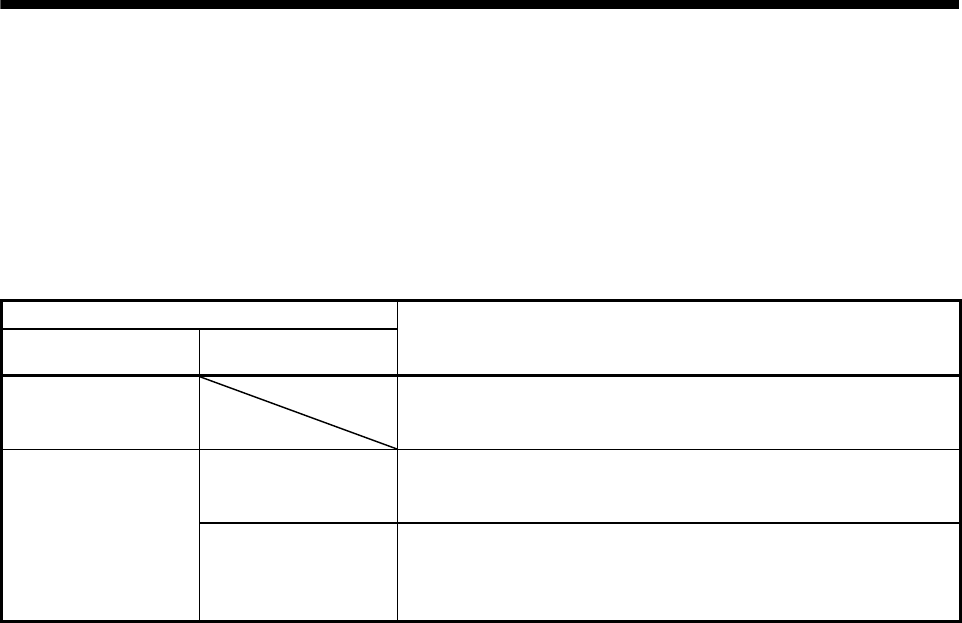
Tandem drive options (parameter No.0265)
Application
Compensation of home
position return deviation
Home position return
method
Deviation compensation
invalid
Uses the proximity dog front end as the home position. Use this method
when there is no need to consider the mechanical deviation such as the
case where no deviations occur between master axis and slave axis.
Deviation compensation
valid
Adjustment mode
Use this mode to calculate the proximity dog front end offset (amount of
deviation in the position of the proximity dog front end for the master axis
and slave axis) during mechanical adjustment.
Normal mode
Use this mode to detect the amount of proximity dog front end deviation
between master axis and slave axis and perform tweaking (compensation of
deviation between master axis and slave axis) in normal operation so that
the axis is mechanically at a right angle.