


















Positioning Control Advanced Positioning 4
4-5
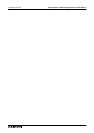
X axis
Start
point
Y axis
Original
end point
Change
point
Changed
end point
Speed change in X axis
Speed
Time
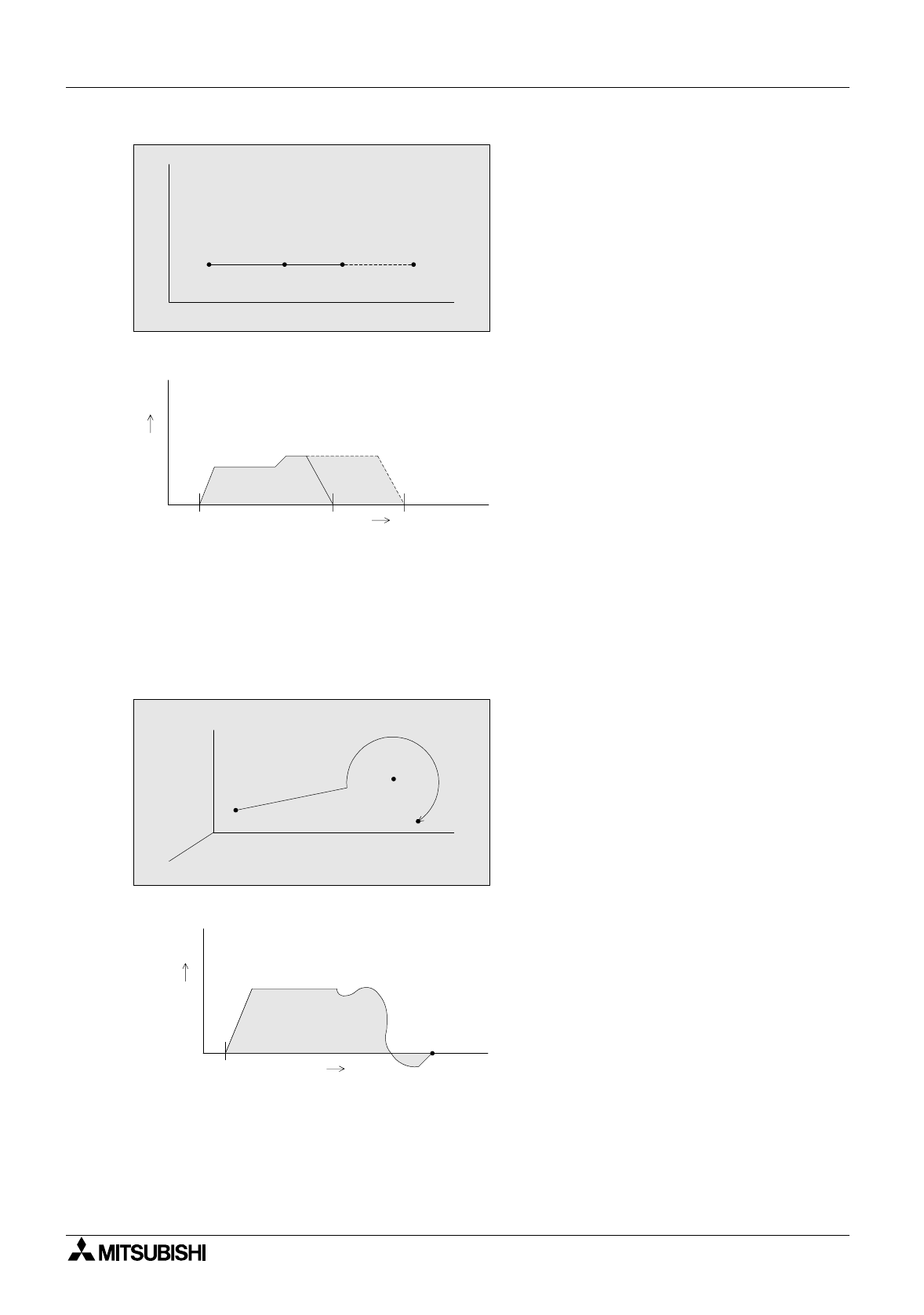
X axis
Start point
Y axis
End
point
Z axis
Speed change in the Y axis
Speed
Time
< Position follow-up control >
- If the end point address is changed
while a positioning control movement
is being executed, positioning is
controlled to the new end point
address.
- Applicable models
[A171SH,A172SH,A273UH]
- Application examples
[Product follow-up type, application
line and welding line]
< Three-dimensional interpolation control >
- From the start point which is the
current stop address, 3-axis linear
interpolation control and 3-axis
circular interpolation control are
performed to the end point address by
way of passing points.
- Applicable models
[A171SH,A172SH,A273UH]
- Application examples
[Assembly robot, welding robot,
application robot and transfer robot]