



















Positioning Control Components of Positioning Control and Their Roles 3
3-4
3.1 Positioning controller
As the positioning controller gives position commands to the servo amplifier, positioning
programs should be created, and parameters defined. The contents related to programs and
parameters are described below.
3.1.1 Command pulse and feed quantity
There are the following three types of command pulse output modes.
- PLS/SIGN mode
- CW/CCW mode
- A phase/B phase mode
From the three, the CW/CCW mode is picked up for explanation.
• When the servo motor encoder generates 8,192 pulses for one rotation, the command
pulse number "8,192" should be output to rotate the servo motor by 1 rotation. The
workpiece feed quantity is in proportion to the pulse number.
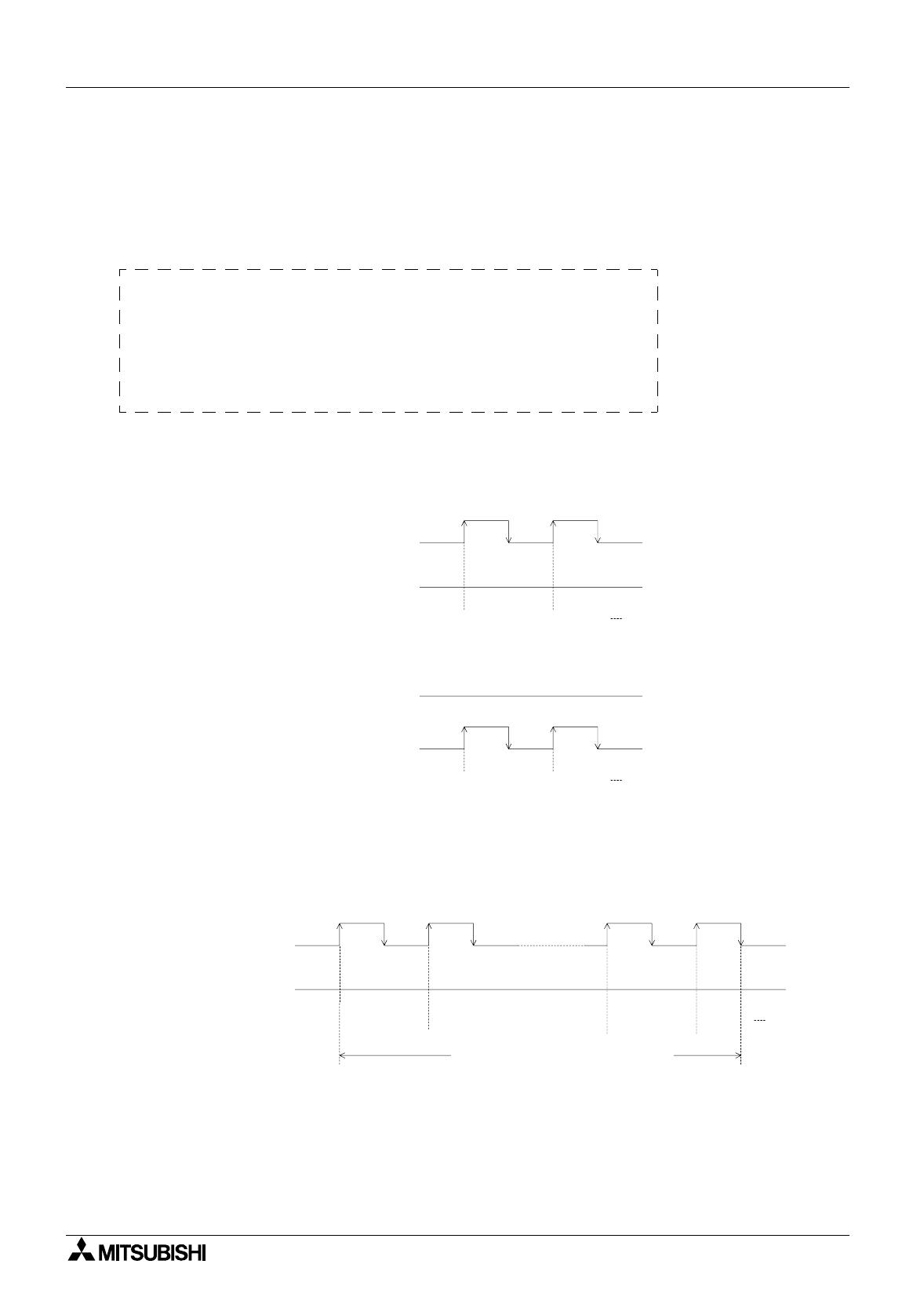
3.1.2 Command pulse and feed speed
• When the servo motor encoder generates 8,192 pulses for one rotation, the command
pulse frequency (speed) "8,192 pulses/s" should be output to rotate the servo motor by 1
rotation per second.
• Decrease the pulse frequency to rotate the servo motor at lower speed.
• Increase the pulse frequency to rotate the servo motor at higher speed.
0
-1 -2
< Reverse rotation command >
Forward rotation pulse output
Reverse rotation pulse output
(-8192) pulses
0
12
< Forward rotation command >
Forward rotation pulse output
Reverse rotation pulse output
(8192) pulses
0
Pulse number output per
second (frequency)
(
8192)
pulses
1
2
Forward rotation
pulse output
Reverse rotation
pulse output