


















Positioning Control Components of Positioning Control and Their Roles 3
3-7
3.2 Servo amplifier and servo motor
The servo amplifier controls the movement quantity and the speed in accordance with
commands given by the positioning controller. The servo motor transmits rotation to the drive
mechanism after receiving a signal from the servo amplifier.
3.2.1 Positioning control in accordance with command pulse
• By PWM (pulse width modulation) control, performed to the servo amplifier main circuit with
regard to the position command and the speed command, in accordance with the command
pulses of the position controller, the servo motor is driven. The rotation speed and the
rotation quantity are fed back from the encoder attached to the servo motor.
3.2.2 Deviation counter function
• The difference between the command pulses and the feedback pulses counted by the
deviation counter in the servo amplifier is called accumulated pulses.
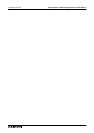
• While the machine is operating at a constant speed, the accumulated pulse quantity is
almost constant. During acceleration and deceleration, the accumulated pulse quantity
changes more dramatically.
• When the accumulated pulse quantity becomes equivalent to or less than the specified
quantity (in-position set value) after command pulses have stopped, the servo amplifier
outputs the positioning completed signal.
The servo motor continues operation even after that. Then, when the accumulated pulse
quantity becomes 0, the servo motor stops.
The time after the servo motor outputs the positioning completed signal, until it stops is
called stop settling time.
3.2.3 Servo lock function
• The servo motor is controlled so that the accumulated pulse quantity counted in the
deviation counter becomes 0.
• For example, if an external force for forward rotation is applied on the servo motor, the
servo motor performs the reverse rotation operation to eliminate the accumulated pulses.
Accumulated pulses in deviation counter Servo motor
Minus pulses Reverse rotation operation
Plus pulses Forward rotation operation
0 (zero) Stop
Stop settling time
Motor speed
Speed
Accumulated
pulses
Command speed
Time
The accumulated pulse quantity is 0, and
positioning is completed.